Tongyan Hua - 华 彤延I am a Ph.D. student in the AI 4D City (AI4City) Lab at HKUST, Guangzhou, supervised by Prof. Wufan Zhao, Prof. Ying-Cong Chen and Prof. Yuan Liu. My current research interests focus on AI-based 3D computer vision. I have had the honour to collaborate with Prof. Wenming Yang at Tsinghua University and dear Prof. Addison Lin Wang at NTU, Singapore, working on knowledge distillation and Neural Radiance Fields (NeRF), respectively. Before this, I had extensively explored various research areas, including biotechnology, operational research, and geography, driven by pure interest. I was also a robotics algorithm engineer at Country Garden Group, focusing on visual SLAM for indoor construction robots. I obtained my M.Sc. degree funded by three competitive scholarships at TU Delft and Leiden University. I completed my B.Sc. degree with the highest thesis score at Jiangnan University. |

|
Selected Publications
Note that some teasers are GIFs, please hover the mouse over to view the animation.
|
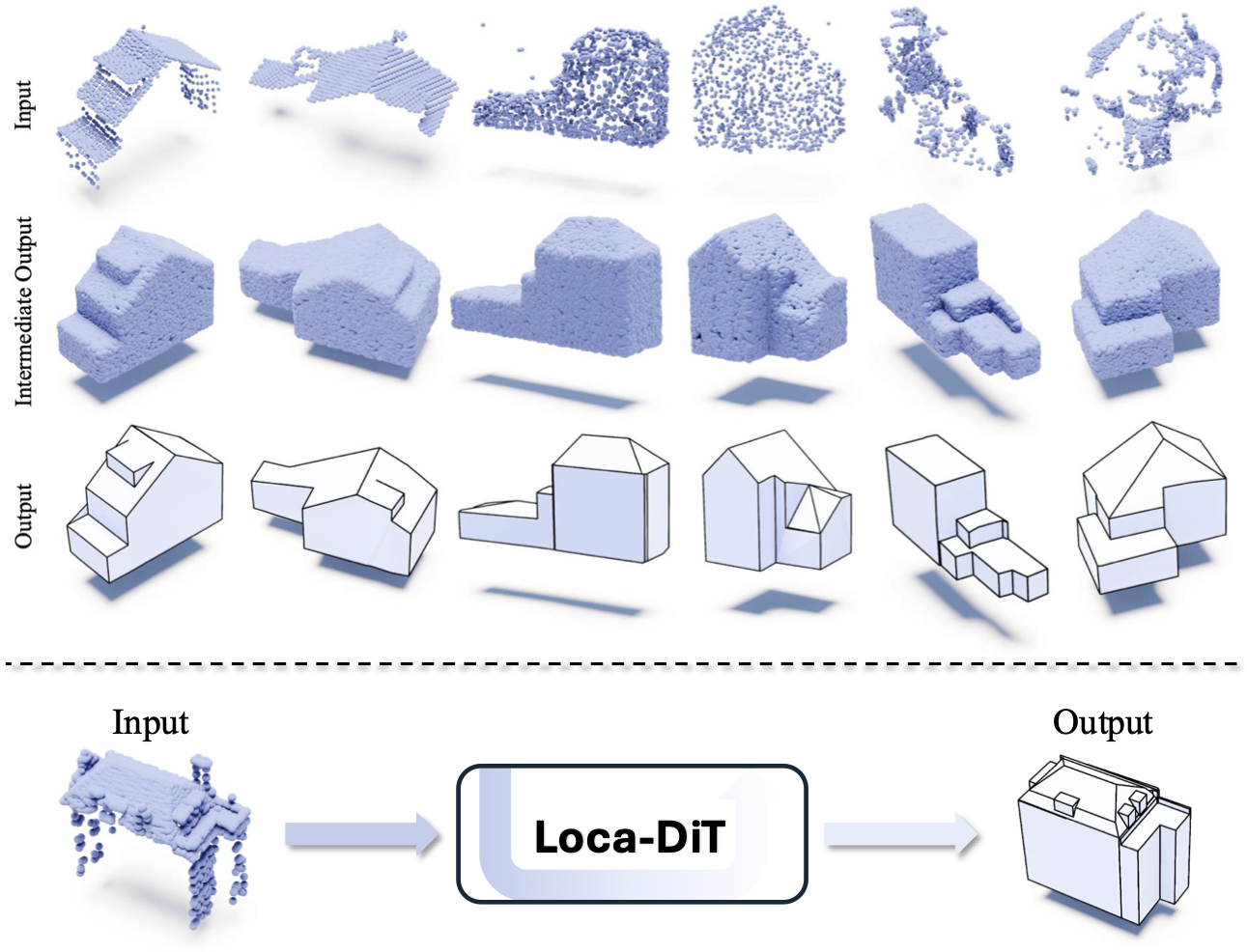
BuildAnyPoint: 3D Building Structured Abstraction from Diverse Point Clouds
BuildAnyPoint showcases remarkable generalization across various point cloud distributions commonly found in urban settings. We are the first to tame Artist-Mesh (AM) generation models for severely disturbed input point clouds commonly encountered in large-scale urban observations. |
|
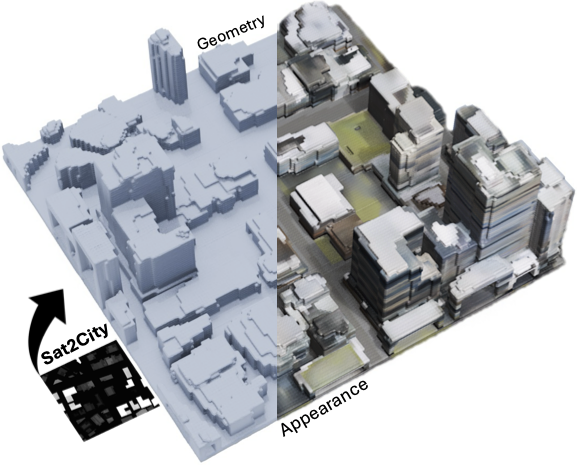
Sat2City: 3D City Generation from A Single Satellite Image with Cascaded Latent Diffusion
We propose Sat2City, a novel framework that synergizes the representational capacity of sparse voxel grids with latent diffusion models, tailored specifically for our novel 3D city dataset. |
|
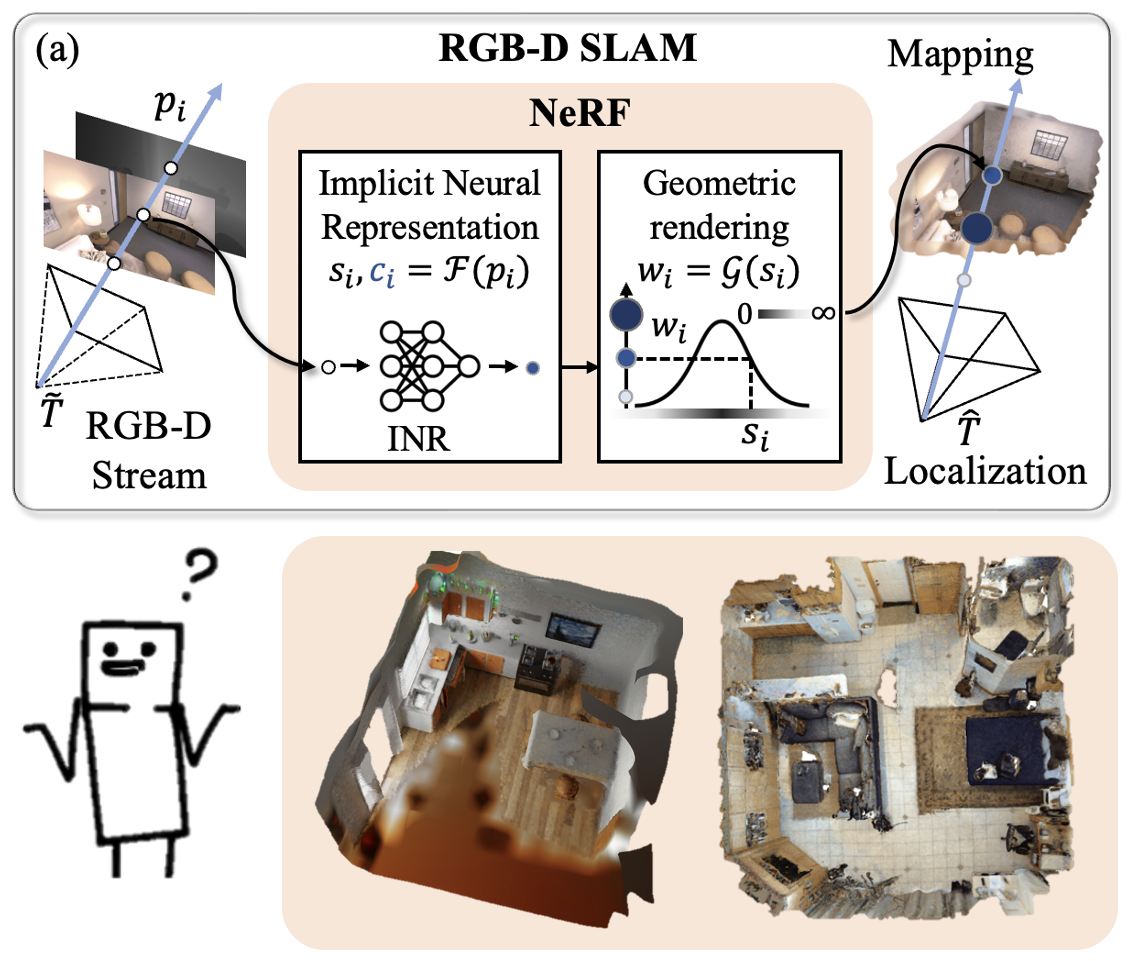
Benchmarking Implicit Neural Representation and Geometric Rendering in Real-Time RGB-D SLAM
Implicit neural representation (INR), in combination with geometric rendering, has recently been employed in real-time dense RGB-D SLAM. In this work, we establish, to our knowledge, the first open-source benchmark framework to evaluate the performance of a wide spectrum of commonly used INRs and rendering functions for mapping and localization. |
|
Hi-Map: Hierarchical Factorized Radiance Field for High-Fidelity Monocular Dense Mapping
In this paper, we introduce Hi-Map, a novel monocular dense mapping approach based on Neural Radiance Field (NeRF). Hi-Map is exceptional in its capacity to achieve efficient and high-fidelity mapping using only posed RGB inputs. |
Academic Service
Conference Reviewer: IROS 2024, ICCV 2025, NeurIPS 2025; CVPR 2026; ECCV 2026
Journal Reviewer: TCSVT
Contact
Tongyan Hua
No.1 Du Xue Rd
HKUST, Guangzhou
China
Last update: 2 March 2026